RESEARCH DOCTORATE

PhD Top Stories


PhD Top Stories
Matteo Caruso
Dynamic Modeling and Simulation of a Robotic Lander Based on Variable Radius Drums
Doctoral Programme in Industrial and Information Engineering
In Space Exploration, in the context of landing on celestial bodies, soft-landing for a lander, represent the most important and critical task, to which depends the success or the failure of the whole exploration mission, which in the worst scenario results in a waste of time, materials and investments. When dealing with soft-landing two main problems arise: the first is about the correct design and dynamics modelling of the system which is going to be deployed and must have impact mitigation capabilities and high stability properties; the second instead is about the determination of the characteristics, possibly in advance, of the underlying soil which has high influence during the overall impact process. A novel three-legged robotic lander is designed and presented. The lander is based on a passive mechanism employing Variable Radius Drums (VRDs), which is a device characterized by the variation of the spool radius along its profile; cables and linear springs for impact energy transfer and storage. Moreover, ratchets are introduced as retention mechanisms in order to prevent the discharge of the springs, hence preventing the lander from bouncing and keep the body close to the ground increasing stability. The main mechanism acts as a fully passive shock absorber device which has the capability to shape the elastic response of a preloaded spring; in this context ensuring a constant force between the lander pad and the soil, thus ensuring a controlled deceleration, in the phase of impact with the ground, of the onboard instrumentation and the supported payload, hence preventing damage due to extreme accelerations.
The proposed lander is characterized on having properties of reusability, high payload/lander mass ratio, and modularity. Given the operating conditions, the profile of the VRD is first synthesized, then a simplified bidimensional dynamics analytical model of the proposed lander is derived, furthermore a full model of the lander is built and simulated in ADAMS, a commercial multi-body dynamic simulator. The conducted simulations are based on the experimental determination of the characteristics of a sample soil; a basaltic sand of volcanic origin with average grain size range of 3 to 5 mm, which falls back into the coarse sands. Finally, the proposed lander, and its analytical model are validated numerically through comparison with the ADAMS simulations. Two cases are considered: the first is the impact on an horizontal surface (see Figure 1 left), hence the behaviour of the system is studied along with the analysis of the distributions of the contact force, the lander deceleration and the angular displacement of the legs; the second instead is a topple simulation (see Figure 1 right), in which the goal is to find the critical angle of the landing site at which the lander topples, which is found to be 51.6�.
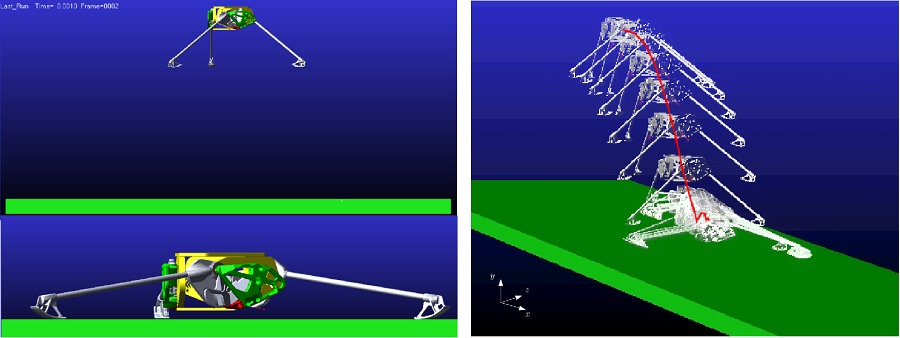
Figure 1: In the left two frames of the impact on the horizontal surface: the initial conditions and the end of the simulation; in the right a time-series representation of the lander and its trajectory in the simulation of the impact on an inclined surface.
Moreover, comparisons between the analytical model and the ADAMS simulations are conducted in the scope of the first case, and reported in Figure 2, showing the acceleration, the contact force and the leg joint rotation. Still with reference to Figure 2, similarities in the trends can be found thus suggesting that the analytical model describes well the behaviour of the robotic lander. However, discrepancies can be seen and can be addressed to different factors such as: physical dimensions of the contact patch, a slightly different way of how contacts are handled and the incapability of the analytical model to catch 3D related phenomenon. However, despite the discrepancies the results of the two models show remarkable adherence, thus validating the approach. Moreover, the possibility to use a robotic lander having a fully passive shock absorbers based on VRDs is confirmed.
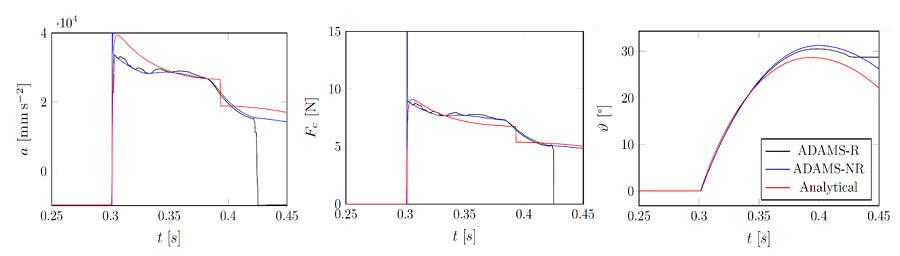
Figure 2: Comparison between ADAMS simulations with and without retention mechanism (black and blue curves respectively) and the analytical based simulation (red curves). In the left the lander acceleration, in the middle the contact force between the soil and the lander pad and in the right the leg joint rotation.
Authors and affiliations
Matteo Caruso1, Lorenzo Scalera2, Paolo Gallina1, Stefano Seriani1
1Department of Engineering and Architecture, University of Trieste, via A. Valerio 6/1, 34127 Trieste, Italy
2Polytechnic Department of Engineering and Architecture, University of Udine, via delle Scienze 206, 33100 Udine, Italy
2Polytechnic Department of Engineering and Architecture, University of Udine, via delle Scienze 206, 33100 Udine, Italy
Contact
Matteo Caruso, email: matteo.caruso@phd.units.itReference
M. Caruso, L. Scalera, P. Gallina, S.SerianiDynamic Modeling and Simulation of a Robotic Lander Based on Variable Radius Drums
Applied Sciences 10, 8862 (2020)
DOI: 10.3390/app10248862
![]()
Piazzale Europa, 1 - 34127 - Trieste, Italia -
Tel. +39 040 558 7111 - P.IVA 00211830328
C.F. 80013890324 - P.E.C. ateneo@pec.units.it